Wednesday, September 19, 2012
Monday, September 17, 2012
Wednesday, September 12, 2012
Saturday, September 8, 2012
Robô Curiosity usa câmera no braço para tirar auto-retrato em Marte
Robô Curiosity usa câmera no braço para tirar auto-retrato
em Marte

Veículo testa lente de câmera antes de usá-la com mais
frequência.
Jipe Opportunity também fez imagens da superfície do planeta vermelho.
Jipe Opportunity também fez imagens da superfície do planeta vermelho.
O robô Curiosity, que está em Marte há um mês, usou uma
câmera localizada em um de seus braços para tirar um autorretrato. A foto foi
feita na sexta-feira (7) e divulgada neste sábado (8) pela agência espacial
americana (Nasa).
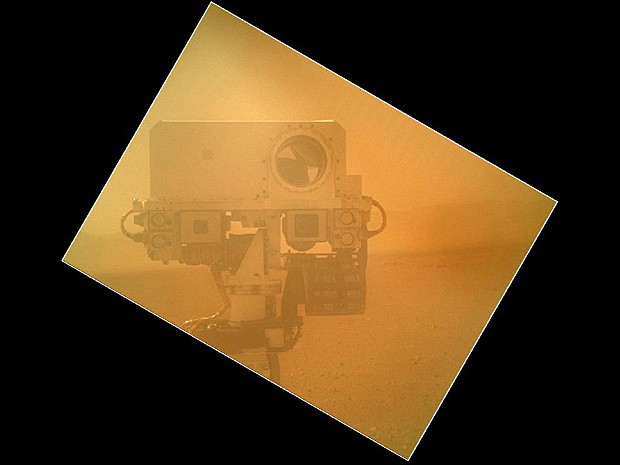
O que a princípio parece vaidade é, de fato, um teste para
verificar se a câmera Mahli estava funcionando corretamente. A imagem foi
captada intencionalmente com a tampa sobre a lente, para observar se ela estava
livre de detritos que eventualmente pudessem danificar o equipamento.
A imagem também mostra as câmeras Mastcams, situada no
mastro do veículo, e Chemcam. O ângulo do quadro reflete a posição da Mahli.

Esta semana, outros instrumentos e ferramentas do Curiosity
foram avaliados, por meio de imagens registradas pelas Mastcams e Navcams. Na
foto abaixo, está o equipamento Chimra, que está sendo analisado e, assim que
for liberado, deve agitar e peneirar amostras do solo para estudar a composição
orgânica de Marte.
Wednesday, September 5, 2012
Monday, September 3, 2012
HUBO - Korean Walking Humanoid Robot

HUBO (휴보
KHR-3) is a walking humanoid robot, head mounted on a life-size walking bipedal frame,
developed by the Korea
Advanced Institute of Science and Technology(KAIST) and released on January
6, 2005. Hubo is short form for "humanoid robot."
Hubo has voice recognition and synthesis faculties, as well
as sophisticated vision in which its two eyes move independently of one another.
Korea's history in robotics engineering is relatively short.
KAIST only began research in 2000, led by professor Oh Jun-ho. The first prototype,
KHR-0, consisting of two legs without an upper body was built by 2001. KHR-1 was
developed without a head or hands released in 2003, followed by a complete
humanoid KHR-2 in
2004.[1]
On January 25, 2005, Gizmag reported on KAIST's unveiling of
the KHR-3 HUBO.[2]
The KHR-3's physical specifications, such as height, weight,
and the number of DOFs (degrees of freedom), were similar to Honda's ASIMO,
which served as the benchmark for the project. In terms of AI and movements,
HUBO fell short of the "next-gen ASIMO," which was unveiled three
months later. While HUBO could only walk at 1.25 km/h, the ASIMO could
walk at 2.5 km/h and also run at 3 km/h . The ASIMO was also capable of
walking up and down stairs, which was a temporary shortcoming for HUBO needing
further development. The unnerved KAIST researchers noted, however, that HUBO
could play kai-bai-bo (the Korean version of rock-paper-scissors), which was impossible for
ASIMO since its fingers could not move independently of each other.[1]
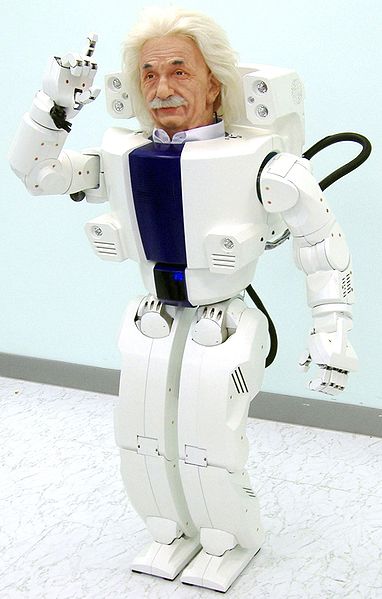
On November
of '05, KAIST, Korea and Dallas , Texas based
Hanson Robotics, Inc (HRI) released the world's first android head mounted on a
life-size walking bi-pedal frame at the APEC Summit in Seoul , Korea
The humanoid prototype was officially dubbed "Albert Einstein Hubo".
Jaemi HUBO was developed from 2008 to 2009. The complete
humanoid robot was given a slimmer design with an aluminum endoskeleton and a
polycarbonate frame, resulting in a slightly taller height but a 20% lighter
weight than its predecessors. Its movements were more realistic since the arms
made quicker and more natural motions, and the legs could stretch to imitate
human walking, which also consumes less energy than the traditional humanoid
walking based on the Zero
Moment Point trajectory. Its walking speed was improved to
1.4 km/h, and it also acquired the ability to run at 3.6 km/h (which
is still much slower than the new ASIMO's 6 km/h by
comparison).[1]

|
|
KHR-0
(2001) |
KHR-1
(2002) |
KHR-2
(2004) |
HUBO (KHR-3)
(2005) |
Albert HUBO
(2005) |
HUBO 2 (KHR-4)
(2008) |
|
Weight
|
|
|
|
|
|
|
|
Height
|
|
|
|
|
|
|
|
Walking speed
|
-
|
1.0 km/h
|
1.2 km/h
|
1.25 km/h
|
1.25 km/h
|
1.5 km/h
|
|
Continuous operating
time
|
-
|
-
|
-
|
60 minutes
|
60 minutes
|
120 minutes
|
|
12
|
21
|
41
|
41
|
66
|
40
|
Subscribe to:
Comments (Atom)